
文|节点财经 崔大宝
4月28日,“闪电”访华不到24小时的马斯克收到了他念兹在兹的“大礼包”。
当天,中国汽车工业协会发布《关于汽车数据处理4项安全要求检测情况的通报(第一批)》,特斯拉Model 3和Model Y两款国产车赫然在列,也是目前唯一一家符合该要求的纯外资品牌。
这为特斯拉FSD落地中国(Full Self Driving,完全自动驾驶)逐步扫清障碍。
而对国内高阶智驾领域的玩家来说,就像多年前“鲶鱼”搅动春水一般,商业生态可能被重构,市场格局可能被改写,新一轮洗牌局的大幕轰然拉开。
01 2024,车圈狂卷“端到端”
锚定特斯拉FSD V12版本,“端到端”三个大字牢牢焊死在2024车圈“风口“,并推动高阶智驾“卷”上新台阶。
身处摧枯拉朽的浪潮中,所有头部参与者都不约而同地转向端到端智驾路线,并视其为狙击对手、裁夺周期的“大杀器”,即只用一个模型,就能把摄像头等传感器收集到的感知信息变成车辆方向盘怎么转、油门踩多少等操作信号,让汽车自动行驶。
5月20日,小鹏汽车在北京举办“AI DAY”,宣布即日起开始向用户推送基于端到端大模型的智能驾驶和智能座舱系统,成为中国市场首家正式向用户推送端到端大模型应用的企业。
图源:小鹏汽车官微
除了小鹏汽车,小米汽车已推送端到端的智能泊车;蔚来表示将在上半年上线“基于端到端”的主动安全功能;理想在4月的英伟达GTC2024上阐述了端到端架构设想;华为预计在6月上市的享界S9上首发端到端的ADS 3.0智驾系统。
4月15日,在长城汽车董事长魏建军的直播首秀中,来自毫末智行、元戎启行的端到端智驾方案引发外界关注。
为什么新旧势力都在押注“端到端”?说到底,还得归结于效果。高阶智驾从“高速NOA(Navigate on Autopilot自动辅助导航驾驶)”进化到“城区NOA”,因为后者的种种不足,较大程度地掣肘消费者的体验,动摇其买单决心。
《2024麦肯锡中国汽车消费者洞察》报告显示,消费者对各类自动驾驶功能的兴趣正在提升,但愿意为之额外付费的意愿却在下降;其中一线城市的付费意愿下降尤为明显。
地平线创始人、首席执行官余凯指出:“高速NOA可以说已经做到了好用,或者说刚到好用的阶段,但是否做到了让客户爱用,还要打个问号。而至于城区NOA,现在恐怕还达不到可用的门槛。”
背后的原因不难理解。
高速NOA、城区NOA,虽然只是两个字的差距,但是表达的意义、涉及的范围却有很大不同,用户感受亦如云泥之别。
节点财经总结,大概有以下几点:
相对高速公路,城市的路况更加复杂且干扰多,需要处理信号灯、行人、自行车,以及施工区域、恶劣天气、临时管制等诸多突发事件,这给自动驾驶的识别造成极大的挑战。
特别在我国的城市路况中,车辆的极限加塞、变道、超车等不规范行为,公交、客车、卡车等大型车辆切入等情况比较频繁,又增加了道路交通的不确定性,这些长尾场景的存在让自动驾驶很难保证百分百的绝对安全。
成本过高、全场景NOA受高精地图覆盖限制。
不少车主都反映,现阶段的城区NOA噱头大于实际,基本二、三十公里就得人工接管一次,离“轻松便捷”相去甚远,以常见的路口转弯为例,启动城区NOA功能后,动辄就会遇到系统fullstop或者行驶轨迹异常生硬等各种问题,导致自动驾驶的流畅性和可靠性不佳。
如何让高阶智驾走向可用、好用?在首席激励师马斯克的推介下,更具人化思维的“端到端”模型亮相舞台中央,掀起风起云涌之势。
02 “端到端”路线,让AI化身司机的“良药”?
事实上,端到端并不是一个全新的概念。在人工智能赛道,它是一种普遍使用的方法。核心思想是将整个任务的流程简化为一段输入到输出的映射过程,通过单一的计算模型来实现。
比如在各种AI翻译、语音转文字应用中,端到端都扮演了关键角色:原始数据被送进一张深度神经网络中,经过一系列运算后,直接给出最终结果。
不置可否的是,“端到端”模型的加码,为AI像人类司机一样开车,提供了新的解法,打开了新的窗口。
元戎启行CEO周光表示:“端到端模型的应用将会颠覆汽车的工具属性,让汽车变成一个善于思考、推理的出行机器人。对汽车产业链而言,端到端模型将会改变汽车的盈利模式,提高消费者为智驾系统付费的意愿。”
回归到理论“原点”,传统模块化智能驾驶系统的设计,将整个自动驾驶流程拆分为感知、预测和规划等多个独立的功能模块,每个模块负责处理特定的工作。
虽然这种方法在早期的自动驾驶技术发展中起到了积极作用,但也暴露出了一些明显的弊端,包括信息传递的减损,系统维护的繁琐,应对城市交通的多变性和不可预测性时,缺乏整体的协调和灵活性等。
相比之下,端到端路径则凭借海量数据训练系统,赋予机器自主学习、深入思考和全面分析的能力,加速高阶智驾技术向高度拟人、“类人”升腾,即懂人、识物、辨路,能够对所见到的情境作出本能、丝滑的反应。
就像成排的锥桶、静止水马、倒地的大树、侧翻的车辆、山路滑坡的大石碎石、路边运输掉落的纸箱等障碍物,自动驾驶会判断、处理,“凡是挡道的,一概在我的视线扫射范围内,要及时避让或绕行。”
在这一块发力的除了蔚小理、长城等众多整车制造车企,还有毫末智行、元戎启行、地平线等产业链企业。
元戎启行从2023年就推出了不依赖高精地图的智驾路线,让模型感知道路拓扑结构,让预测和规划由规则驱动变成了数据驱动。

图:元戎启行端到端模型技术变迁
运用元戎启行端到端模型的道路测试中,在停车的状态下,车辆“看到”后车打转向灯,会主动礼让对方右转;如果遇到前方有多辆车违停,该车不会呆板地趴在后面傻等,而是能够“脑补”前车的行驶意图,触发“此路不通,另择他路”的动作。
地平线的起步更早。其在2016年便率先提出了自动驾驶端到端的演进理念,并在2017年就开始采用训练端到端系统,同时发布软件框架Hugo。
2022年,地平线又提出行业领先的自动驾驶感知端到端算法Sparse4D,2023年,由地平线学者一作的业界首个公开发表的端到端自动驾驶大模型UniAD,荣获CVPR 2023最佳论文。
论文中, UniAD 框架被首次提出,成为业界首个感知决策一体化的自动驾驶通用模型。
毫末智行则采取分解端到端大模型的方式逐一突破:先解决感知问题,即让模型看懂世界,再解决认知问题,即做出驾驶决策。
这样做的好处一是顺序分明,独立训练、优化,然后通盘调和、集成,降低训练难度,更精细地调试性能;二是在不同节点有针对性地选用不同类型的数据,降低训练成本。
得益于先驱者的努力,城区NOA从“可用”走向“好用”,直至“爱用”,有了更适应的底层逻辑和现实础石的支撑,高阶智驾的比拼也将迎来新节点。
03 “端到端”背后,到底要比拼什么?
当下,“端到端”路线无疑是高阶智驾领域的确定性趋势。但想要让该功能被大众广泛接受,真正普及化,充足性能的硬件架构、算力和强劲的软件算法才是关键。
一方面,基于智能驾驶技术的不断发展,对车规芯片的功耗、速度等都提出更高要求,并且具有极强的科技前瞻性。
这也是为什么,芯片厂商一直强调,至少要看到 5 年后车企的需求。
今年3月,元戎启行宣布与英伟达达成合作,将于2025年采用DRIVE Thor芯片适配公司的端到端智能驾驶模型。
另一方面,行业从“软件定义汽车”跃迁到“软件定义芯片”,软件愈发彰显出中枢价值,发挥的作用越来越重要。
值得注意是,不满足于只做芯片,巨头英伟达正暗戳戳布局智驾。
自去年底发布在中国招聘自动驾驶人才的信息后,涉及自动驾驶软件组、自动驾驶平台组、系统集成&测试组、地图&仿真组、产品组五大条线的25个岗位,英伟达相继招揽来小鹏汽车智能驾驶的灵魂人物吴新宙,百度 L2+业务的车端整体软件架构以及规控和车辆交互技术负责人罗琦等超级“大牛”。
2024年3月,英伟达推出新一代人工智能芯片和用于运行人工智能模型的软件。
一个领域“顶层设计”的更新,往往是由“执牛耳者”将涟漪变为浪潮。之所以这么说,是因为龙头企业有其特殊性,代表的是将来时、“风向标”、“链主”。
换言之,英伟达的举动,也将深刻影响行业的走向:明确竞争的“护城河”、树立未来的增长指引、描摹成长的蓝图。
更直白地解释,软硬结合已确凿为高阶智驾的“胜负手”,通向“明天”的阶梯。
以此为“风向标”,本土供应链上的各路人马各有侧重地展开了激烈的逐鹿:芯驰聚焦智能座舱和智能车控芯片,抢食高通和英飞凌的“蛋糕”;黑芝麻智能专注于视觉感知技术与自主IP芯片开发,主攻嵌入式图像和计算机视觉;后摩智能毕其功于存算一体技术的大算力计算芯片;元戎启行和毫末智行致力于自动驾驶的人工智能技术;地平线奋力开拓中……
这其中,地平线堪称独特个例,它并没有非此即彼,而是很早就探索并践行了以软件为牵引力,以硬件为推进力,两手抓、两手硬的智驾策略。
于4月底的北京车展上,地平线推出加载端到端技术的量产级高阶智能驾驶系统SuperDrive,有效提升智驾系统在复杂交通环境中的感知和交互式博弈能力。
在一段演示视频中,SuperDrive体现出“更像人”的特征:针对不同路口变道,可以根据对向或旁车道车流进行不同曲率的内切、外切;在碰到行人、两轮车时会主动绕行或减速避。
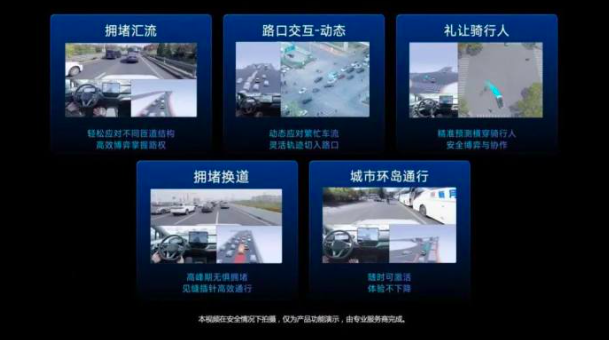
图:SuperDrive演示
据悉,SuperDrive将智驾系统的遮挡准召率提升70%,拥堵场景下的变道成功率提升50%,路口通行效率提升67%。
在计算方案层面,兼顾性能体验和量产效率的征程6旗舰版同步祭出,包括征程6B、征程6L、征程6E、征程6M、征程6H、征程6P,算力在10+TOPS-560TOPS之间。
SuperDrive系统和征程6芯片软硬协同,为车企快速上线各城区NOA功能,高效拓城奠定基础,也很自然地为地平线迈向更扎实的远方插上翅膀。
写在最后
迄今为止,这场以“端到端”为中心的拼杀还在继续,角力的烈度仍在加剧。
显然,高阶智驾赛道的赢家还没有出现,业内也翘首以待。不过,于细微之处见知著,于实效之处见真章,有些选手已凸显领先身位。
评论