
文|极智GeeTech
没有人能拥有能看清未来的水晶球,但每个人都要在当下的市场去布局,这就需要有对未来的预期。
从去年开始,各大车企的技术内卷进入“城市NOA”时刻,一片热火朝天,争先恐后的场面,好不热闹。城市NOA作为目前最受欢迎的自动驾驶产品,也作为最多、最有用的智驾落地场景,将是今年乃至今后几年智驾行业的必争之地。
这不禁让人心生疑问,车企蜂拥而上的城市NOA到底是用户的真实需求,还是臆想出来的幻象?车企们的城市NOA“大饼”能实现吗?
为何要盯上城市NOA?
城市NOA,全称Navigate On Autopilot,通常被业界翻译为“领航辅助驾驶”或“高阶智能驾驶”。不同企业的叫法略有不同,如小鹏称为NGP,理想和特斯拉称其为NOA,蔚来早期叫NAD,长城魏品牌则称其为NOH,但本质上它们都是NOA。
理想状态下,驾驶员只需要在车辆启动前,设置好目的地并选择一条希望行驶的路线,车辆就可在没人接管的情况下到达目的地,智驾系统可以全程控制加减速踏板及方向盘操作。
一直以来,L3都被视为智驾能力的重要分水岭,也是智能汽车拉开竞争差距的真正起点。而以城市NOA为代表高阶智能驾驶,可以看作是一种类L3功能,被业内视为从L2向L3跨越的技术敲门砖。所以车企们无论是想秀技术肌肉,还是想先声夺人,智能汽车下半场的第一场硬仗都将从城市NOA开始打起,而2024年则是城市NOA普及的关键一年。
去年,小鹏G6和问界新M7率先引燃高阶智驾市场的第一条导火线,年底工信部、交通运输部等四部委的《关于开展智能网联汽车准入和上路通行试点工作的通知》,进一步加速了高级别辅助驾驶的落地应用,彻底点燃了城市NOA的战火。
业内最早提出NOA概念的是特斯拉,早在2019年6月,特斯拉就上线了高速工况下的NOA功能,随后以小鹏、蔚来等厂商为代表的造车新势力也迅速跟进,NOA逐渐成为各大主流车型的标配。
根据使用场景不同,NOA主要分为高速NOA和城市NOA。各大厂商之所以率先开放高速NOA,因为高速路况相对来说没那么复杂,实现自动驾驶的难度比较低。
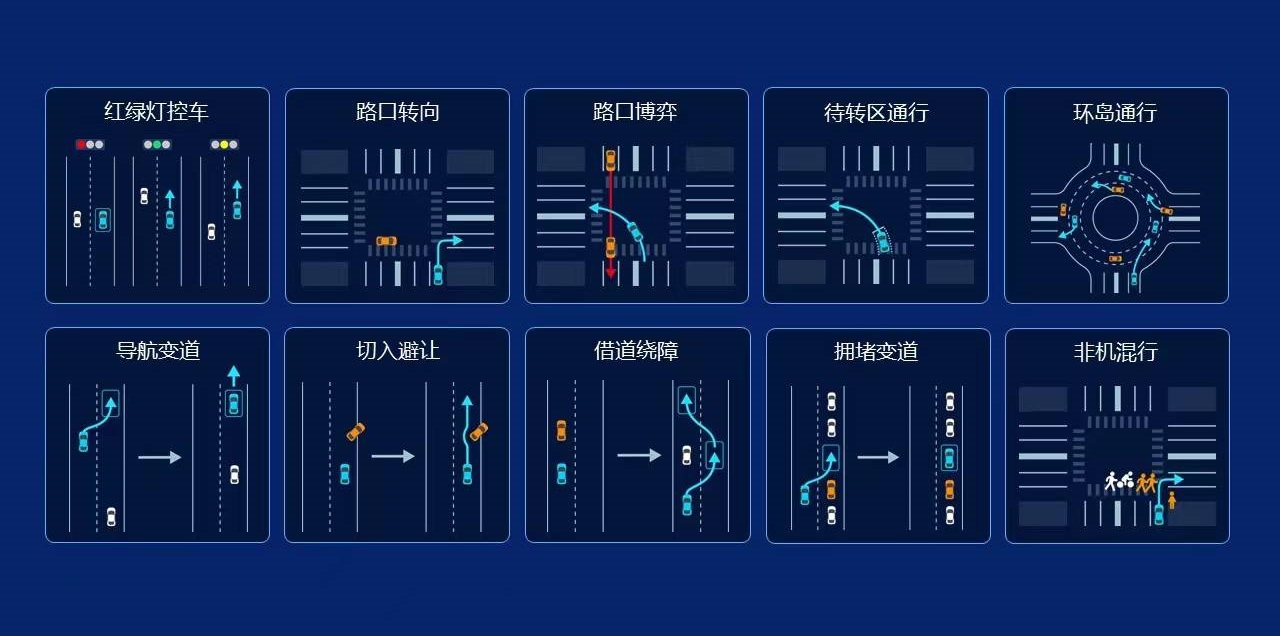
但城市道路不同,它的复杂程度比高速工况提升了几个数量级,行人、电动车、宠物、机动车、非机动车一起出现在城市道路上,存在各种突发情况,比如车辆的极限加塞、公交等大型车辆切入、电动车随意变道等,这些都增加了道路交通的不确定性,对于智能汽车的环境感知能力和数据处理能力都提出了极高要求。
正因如此,不少厂商都把城市NOA的落地速度,包装成主要卖点之一,用来吸引用户。当然,用户也对智能驾驶功能也表现出了浓厚兴趣。麦肯锡的报告显示,中国本土高端新势力能够抢单传统豪华品牌,“更先进的自动驾驶”是排名第二的原因。终端数据也可以佐证以上观点,2023年第四季度,问界新 M7、小鹏G6等车型,智驾版本的订购比例都超过了50%。
技术的面子,降本的里子
在AI大爆发的加持下,过去一年里,智驾领域进行了两种技术路线的尝试。
第一,整个行业都在逐渐从“有图”切换到“无图”方案。
“去高精地图”在2023年几乎成为了整个行业的共识。高精地图为智能驾驶提供的详尽信息主要适用于高速公路场景,但随着智能驾驶“进城”进度加速,传统模式的高精地图明显满足不了智能驾驶驶入城市场景的需求。
我国城市道路环境复杂,高精地图想要辅助智能驾驶“进城”就需更广泛地进行信息采集。基于国家严格的路线监测标准,除高速路段外,我国仅开放了北京、上海、广州、深圳、杭州、重庆这六座城市的高精地图采集权限,这就导致了智能驾驶只能在仅有的城市范围内发挥作用,无法被广泛推广。
除去路况原因外,高频率更新以及高成本的信息采集也是高精度地图无法“进城”的原因。根据《智能网联汽车高精地图白皮书》,分米级地图的测绘效率约为每天每车500公里道路,成本达每公里10元左右,而厘米级地图的测绘效率约为每天每车100公里道路,成本达每公里1000元左右。
目前国内城市道路时刻在更新,而其中的乡村道路更是存在不清晰的部分,是高精度地图无法感知、无法覆盖的。因此,高精度地图难以对城市道路进行具体场景划分,也无法形成统一的地图。若想要满足智能驾驶以上需求,高精地图不仅需要庞大的信息采集,还要达到月度甚至周度的更新频率,这些对高精地图来说都是无法解决的问题。
华为常务董事、终端BG董事长、智能汽车解决方案BU董事长余承东曾表示,他们在上海投入了1~2年的时间,也没有采集完城区的高精地图。
但目前,无图方案也有一些难以解决的问题,首先是车辆传感器采集的某些道路信息属于敏感数据,很难符合合规要求;其次,在没有高精地图的情况下,需要提高车辆的感知力,传感器的成本也会增加。因此,如何在自动驾驶体验与造车成本之间找到最佳平衡,也是摆在车企面前优先要解决的事情。
第二,少数派玩家开始尝试“去激光雷达”的纯视觉方案。
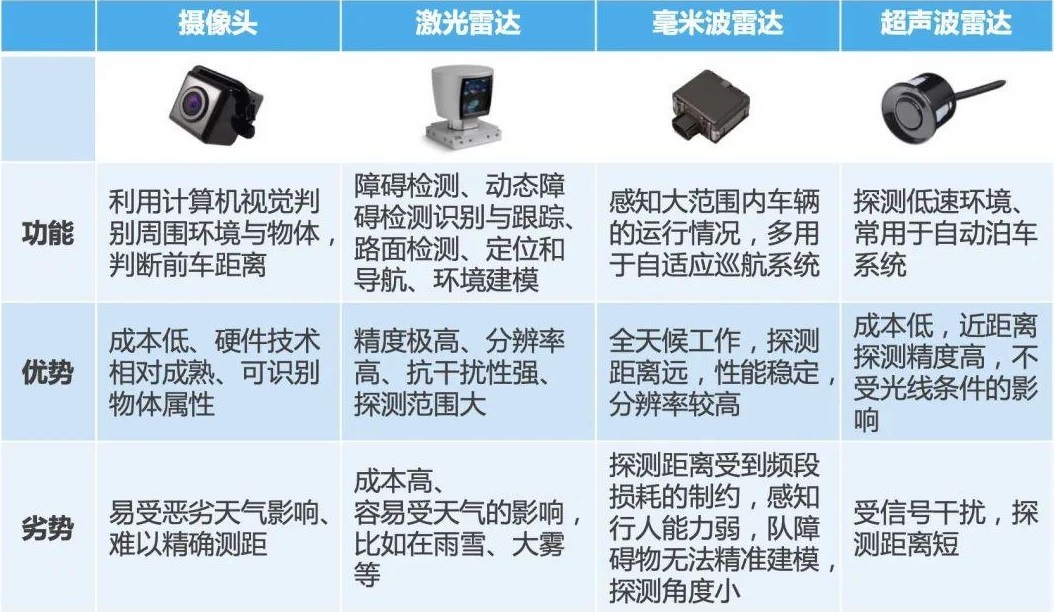
围绕城市NOA目前主要有两条技术路线,一是以特斯拉为代表的纯视觉派,主张取消激光雷达,通过视觉来实现城市NOA;另一派则是“视觉+激光雷达”的技术路线,认为纯视觉存在一定的短板,需要加上激光雷达来实现城市NOA的快速落地。
“视觉+激光雷达”可以提高车端感知能力,从硬件端保障感知范围以及稳定性。比如,在静止起步的场景下,只搭载摄像头的车型可能会撞上距离很近的障碍物(如桩桶、小动物等),而搭载激光雷达的车型,在近距离障碍物的识别率会显著提升。
激光雷达可以应对的另一个场景,就是对异形障碍物的识别。在仅依靠摄像头的纯视觉方案里,由于高度依赖前期标注的先验,没有被标注过的异形障碍物就容易出现无法识别的情况。
现在搭载着NOA功能的车型,主要集中在25万元至30万元以上,而非国内最畅销的10万元至20万元主流量产车型。这其中,激光雷达占据智驾系统较高的成本。为此,各大车企开启了对激光雷达成本的极限压缩。
在2023年激光雷达的一个行业共识是“要上车,先降价”,其单颗价格从 2021年的1万元,降到了2022年约6000元以下,而2023年则又被进一步压到了3000元以下。目前,国内新势力的旗舰车型至少配装了1颗激光雷达,部分车型支持2-3颗激光雷达的选配,以实现硬件层面的安全冗余。
除此之外,还有少数派玩家开始尝试成本更低的去激光雷达纯视觉方案,这条技术路线包括特斯拉、华为、极越、广汽等玩家。小鹏于今年2月披露的新款车型F57也计划放弃激光雷达采用纯视觉方案。
相比较于有激光雷达的方案,纯视觉方案最大的优势就是成本更优,摄像头的成本只有几十美元,这意味着大部分价格区间的车型都可以覆盖这一成本,为智能驾驶的快速推广奠定了硬件基础。同时,与激光雷达相比,摄像头收集到的数据更加丰富,更适合喂养智能驾驶系统来实现数据驱动。
更深一层的原因是,车企们可以通过以价换量、用规模换市场,助推智驾快速普及上车,从而在放大自身差异化优势的同时,实现市场竞争的马太效应;另一个则恐怕是为了以后的价格战,或者说内卷竞争做战略准备。
真的是未来趋势吗?
面对城区里各种各样的交通参与者,甚至是不确定的交通规则破坏者时,即使头部率先开通城市NOA的玩家,其功能仍然还处在“可用”阶段,距离“好用”还有不小距离。
此前在使用高速NOA功能时,已经发生过不少起因车主分身从而产生的交通事故。进入城市NOA时代后,受交通事故影响的不只是车内的驾乘人员,还将波及大量弱势交通参与者。因此,保守稳健应当是城市NOA的关键。
最近半年,自动驾驶领域出现了一些比较明显的变化,最典型的就是各大厂商不再宣传“放开手脚”“躺着开车”,而是把重点放在了辅助驾驶方面,这其实是一种理性的选择,以目前的技术条件,诱导用户去躺着开车,是极其不负责的。
从客观角度来说,城市NOA的确可以在很大程度上提升安全性能。在城市道路上,经常出现鬼探头之类的情况,不少新手司机对如何避免视野盲区也不太在行。城市NOA的普及,可以从一定程度上避免交通事故的出现。
但从技术角度来看,城市NOA也会出现死机、判断失误等情况,如果消费者养成使用城市NOA的习惯,那么在系统不完善的情况下,事故概率反而会增加。
既然依靠自身无法实现瓶颈突破,“车路云一体化”就成为补足单车智能短板的最佳方案。车路云一体化将车端、路端和云端进行融合,利用路边设施和云端计算资源,为车辆提供更全面的环境信息和决策支持,从而提高车辆的感知能力和决策准确性。
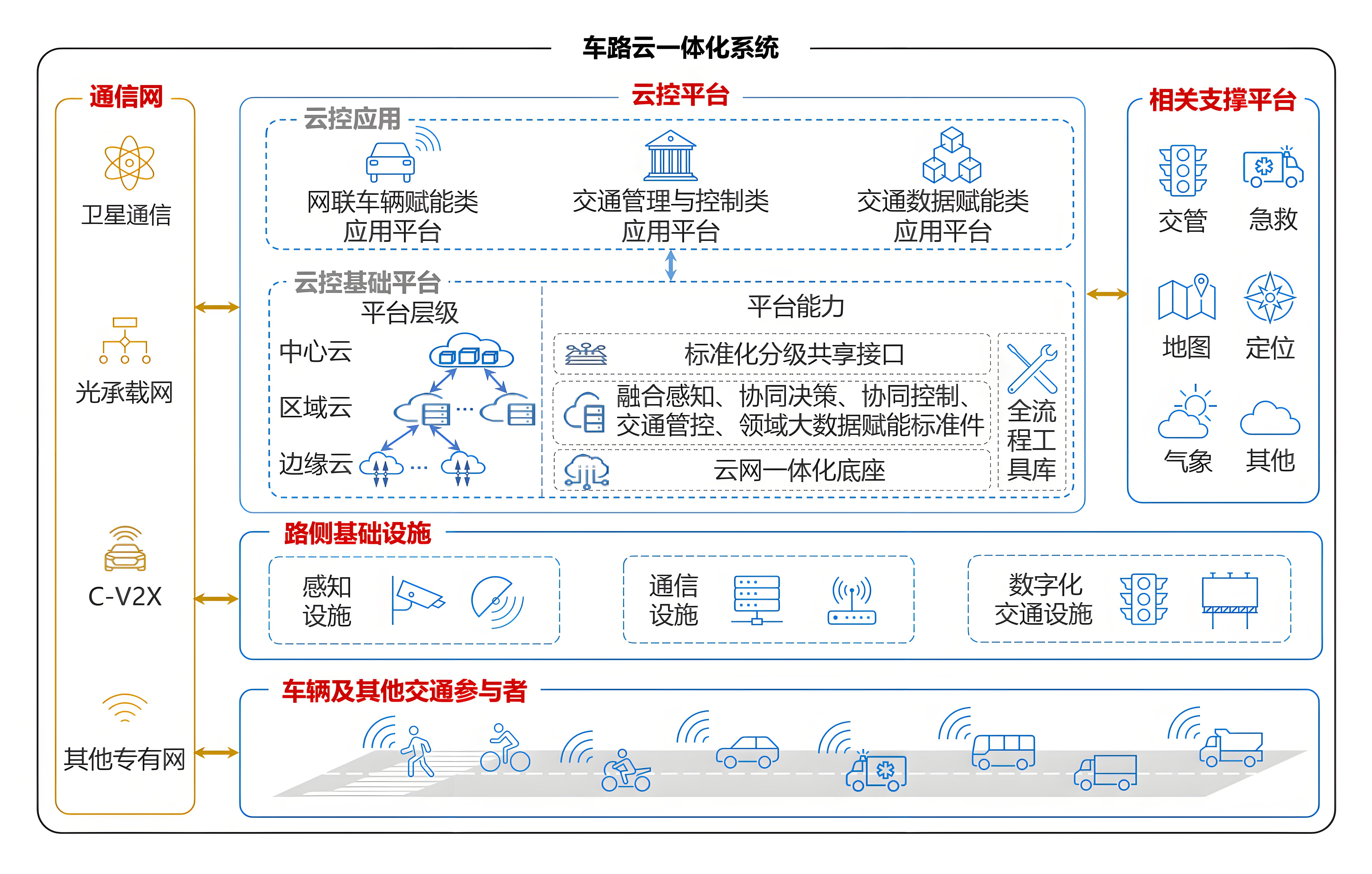
与传统依赖车辆单独采集数据的方式不同,车路云一体化系统能够收集到更庞大的数据量与更丰富的数据类型,比如路口车流、红绿灯信息、超视距路况等,不仅大幅拓宽了训练数据的广度与深度,还显著加速了自动驾驶模型的学习效率与精确度,为实现更高水平的自动驾驶奠定坚实基础。
通过车路云一体化,自动驾驶车辆的传感器不再是唯一的眼睛,通过遮蔽或关闭这些传感器,车辆完全可以依赖路侧基站构建的实时数字孪生系统,将实时路况和环境数据源源不断地传输给车辆,指引其顺利完成自动驾驶任务。
车路云一体化的普及应用,将有助于挖掘智能汽车与交通基础设施、信息通信、交通管理等跨行业、跨领域技术标准的协同需求,推动其与智慧城市、智能交通系统、交通大数据平台等实现互联互通,加速自动驾驶规模化落地进程。
如今,高阶辅助驾驶能力已成为衡量车企竞争实力的一个重要标准。不过从目前情况来看,这项技术依然面临很多的挑战,但国家对车路云一体化的强力推动,也是在为自动驾驶探寻着一条新的实践路径。无论对于车企还是自动驾驶公司来说,这总归是在自动驾驶路上向前迈步的机会,而每一次的挑战,也都是成功的前奏。
评论