
文 丨产业象限 钱江
编辑|山茶
人形机器人行业又迎来一对新的强强联合。
近期,波士顿动力宣称,会使用丰田研究所的“大型行为模型”来训练机器人,它类似于驱动ChatGPT的“大型语言模型”,可以让机器人通过少量演示数据和多模态感知来掌握复杂任务,走向通用机器人。
在过去,这条技术路径一直是马斯克为Optimus(下称“擎天柱”)画的“饼”,想借此实现通用人形机器人。
今年10月初,马斯克以《We, Robot》为主题在加州开了一场“科幻”味儿十足的发布会。在现场,擎天柱以服务员的身份一边为宾客调酒,一边抬手打招呼说着“Hi,everybody”,甚至在现场和宾客热舞。
但发布会结束后,有现场宾客却表示,擎天柱“亲口”向他承认,自己是被远程遥控的。而整个发布会,马斯克也没有透露关于擎天柱的任何技术细节。
看似自主的机器人,依旧离不开人类的远程遥控。
马斯克似乎做了一个双面镜,一面是真实的擎天柱仍然做着人类的提线木偶;而另一面,他又用一种近乎虚假的方式为人们构画出一个可能实现的未来。
但显而易见,马斯克并没有兴趣解答擎天柱当前的研发进度,那么作为马斯克在机器人领域的强敌, 波士顿动力这次与丰田研究所的联合,能将马斯克画的饼实现吗?
波士顿动力,率先走到终点?
想要完成马斯克这张拼图,擎天柱需要拥有与人类和环境交互的能力。
比如将机器人放在厨房,它首先要能识别出自己所处场景是“厨房”。然后,当人类告诉他要做一道菜时,它可以主动从冰箱拿出食材、清洗、切菜、并按步骤烹饪。
要实现这个过程,意味着机器人能够自主辨别什么是冰箱,并移动到冰箱前,打开冰箱门,在众多食材中找到需要的食材,取出来,然后结合各种工具进行清洗.....
这个过程对人类来说十分简单,但对机器人而言却十分困难。
当前无论是老牌人形机器人波士顿动力的Atlas,还是“新贵”擎天柱、Figure,都只能在受限制的环境里执行单一任务,比如在案板前将已经分拣好的各种蔬果拿起或者放下。
▲Figure01拾取水果,图源YouTube@Figure

▲Optimus Gen2拾取鸡蛋,图源YouTube@Tesla
要知道这其中的区别,可以想一想咱们自己家里的冰箱,当各种食材被混杂在一起、用透明塑料袋装着的时候,识别难度就会高于单个的西红柿、红薯。
所以如果将机器人自主做出一顿饭的难度,比作是登上珠穆朗玛峰,那么现在的人形机器人才刚刚坐进学步车。对,它还没有学会“走路”。
而更重要的是,当前机器人学习新技能的效率十分低下,比如学会了叠衣服之后,转而叠被子就要重新学习大量数据。
为了克服这个难题,波士顿动力和丰田研究院团队采用一种新的AI系统“大型行为模型”训练机器人,通过物理演示任务(例如观看视频)进行教学,来帮助将Atlas打造成一款自主性能力强的通用人形机器人。
经过这套“大型行为模型”的训练,机器人可以通过少量数据学习新技能,这种方法叫做“扩散策略”,这套策略可以探索多种不同的路径,并根据实时情况选择最佳方案,它可以帮助机器人更好地应对不确定性的环境,比如突然的障碍或任务变化。
丰田研究院公布了关于这一成果的报告,其中有一个通俗案例可以解释这个策略:
经过扩散策略训练的机器人,可以做酱汁烧注和涂抹任务,需要将酱汁涂抹在披萨面团中心,分拆步骤来看:①握住勺子接近披萨面团中心;②将酱汁以螺旋状铺在披萨上;③提起勺子。

▲论文《扩散政策:通过动作扩散进行视觉运动策略学习》
在这个过程里,披萨面团会随机移动,而机器人可以“随机应变”,它能跟随披萨面团中心位置的迁移而即时挪动勺子。
根据丰田工作人员透露,学会这个能力并不费劲,“这个过程从老师远程操作演示一小部分技能开始”,机器人晚上学习,第二天就可以获得新技能。也就是说,它用少量数据向机器人演示,便能够让机器人获得“泛化”能力。
和传统的机器人学习相比,这种行为模型就像运动界的ChatGPT一样,给它一点行为上的Prompt,就能泛化出一套完成任务的操作轨迹和应变能力。
但并不是任何人形机器人都能适配这套策略,扩散策略更依赖视觉数据,这就需要硬件上拥有高精度视觉传感器,还要拥有抓取复杂和精细物体操作能力。
这也是目前波士顿动力面临的挑战。
其最新款人形机器人Atlas目前并不具备实现“自主”的硬性条件,它既没有灵巧手,又缺乏生活场景的数据。
Atlas机器人虽然具备一定的抓握能力,但其手部设计相对简单,只有三指,并且常用场景是应急救援和工厂搬运,对于生活场景的数据也相对缺乏。
与此相比,特斯拉的擎天柱却显得更有优势。
比如在视觉数据上,特斯拉的自动驾驶一直坚持纯视觉的解决方案,目前市场上运行着将近600万辆特斯拉汽车,可以积累大量的视觉数据。
其次擎天柱在灵巧手、关节有更接近人类的设计。在特斯拉最新展示的视频里,擎天柱可以走到桌边,用双手的“指尖”举起重11kg的4680电池盒。
这双机械手已经拥有22个自由度,分布在手指、手腕和小指下方,而年初手部拥有11个自由度的第二代擎天柱,所有手指都具有触觉感应,能够灵巧地处理鸡蛋等易碎物品。

▲擎天柱举起电池,图源:Tesla@YouTube
所以,虽然波士顿动力和丰田研究院的找到了一种更有效率的机器人训练方式,但想要比擎天柱更快实现真正的自主性,Marc Raibert或许需要联合他的老搭档---曾一起在MIT腿部实验室共事、丰田研究所的CEO兼丰田汽车公司首席科学家Gill Pratt,对目前Atlas的机械手作一番改造,并且补足视觉识别所需要的硬件能力。
马斯克钟爱“奇迹厨房”
与波士顿动力联合丰田研究院发布的新技术相比,马斯克更钟爱打造“奇迹厨房”。
所谓“奇迹厨房”,是指夸大产品能力的科技营销行为。
1959年7月,《展望》杂志刊登了一篇描述未来“奇迹厨房”的文章,让美国人认为,未来自己家庭会有功能齐全、十分智能的厨房,在美国的宣传片中,有一部分电器的运作会被含糊其辞地描述为“自主”的:
“推车会将吃完饭后的脏盘子,推到墙面,进行自动清洗和干燥”
“清洁器可以从墙上自动出来,在清理完地面后,会自动回归原来的位置”
“挥一挥手”就能召唤出隐藏在墙面的饮料机,告诉它“我想喝一罐冰冻橙汁”,饮料机就会自动出水

▲吸尘机器人,照片由Robert S. Lerner Photography LLC拍摄
但这些在50年代令人感到惊奇的黑科技,却是一个实实在在的谎言。
2013年,一位“奇迹厨房”设计师成员揭露,自动洗碗机和清洁器这些“自走式电器”根本无法正常工作,而是工作人员在后台通过遥控操作,让一些隐藏在地板下的电子轨道辅助完成的。
“奇迹厨房”本质上是冷战时期的一种营销工具,设计初衷是为了吓唬苏联游客,让他们产生“一无所有”的感觉。
但从马斯克的角度,他上演“奇迹厨房”的目的,显然并不是为了让人觉得自己一无所有,反而是为了让人们知道自己未来可能会拥有什么。
2021年9月,马斯克在特斯拉AI Day上突然宣布进军人形机器人领域,配合他宣传的是一段“机器人”的热舞,当时这些机器人还只是身穿紧身衣的人类舞者,而仅仅一年之后,擎天柱的原型机就被人搀扶着走上了发布会。
一直以来,马斯克都以这种近乎夸张的方式,超前兜售自己的梦想。今年的《We,Robot》发布会也是如此。
在10月初的《We,Robot》发布会上马斯克用了一种科幻手法,在香槟美酒和灯光舞影之下,一群擎天柱与人类其乐融融地相处,甚至在一个玻璃房里集体大跳“夜店舞”。
▲擎天柱热舞,图源Tesla@YouTube
可能是因为擎天柱的表现过于自然,以致于现场宾客几乎没有格格不入感。
但宾客很快就发现了不对劲。在现场,不同擎天柱的音色不尽相同,并且它们与人类互动的反应是即时的,还伴随着顺滑的手势,相比于自主,更像远程遥控。
连擎天柱自己都承认了这一点,前微软战略家Robert Scoble在X上分享了一段视频,他在现场向擎天柱发问:“How much of you is AI?Some or none.”(你的表现里有多少成分是AI驱动?一点点,还是完全没有?),擎天柱回复“It might be some.”
擎天柱就像提线木偶,和背后操纵它的人类共同演了一场戏。
马斯克并不是第一次这么做,2024年1月份,他在X上发了一个擎天柱叠衣服的视频,并配文“擎天柱在折衬衫。”

▲擎天柱折衬衫,图源X@Elon Musk
眼尖的网友从视频上看到一只快速闪现的手,擎天柱很快被质疑背后由人类远程操控,马斯克也亲自承认了这一点,他发了一条“重要提示”:擎天柱还不能自主地做到这一点。
马斯克的做法,与当年“奇迹厨房”的构建如出一辙。通过模棱两可地描述,来构建一个似有似无的科技场景。
虽然很多人对于这样的营销方式不满,但一些机器人从业者表示理解,谷歌DeepMind一位工作人员Ted Xiao在X上直言“实现低延迟全身远程操作是迈向自主化的一大步”。
特斯拉机器人工程师Milan Kovac在X上也承认擎天柱“一定程度上有人类的帮助”,但它们可以自主行走,并且在保持平衡的情况下,跳了4个小时的舞蹈,期间只摔倒过一次。
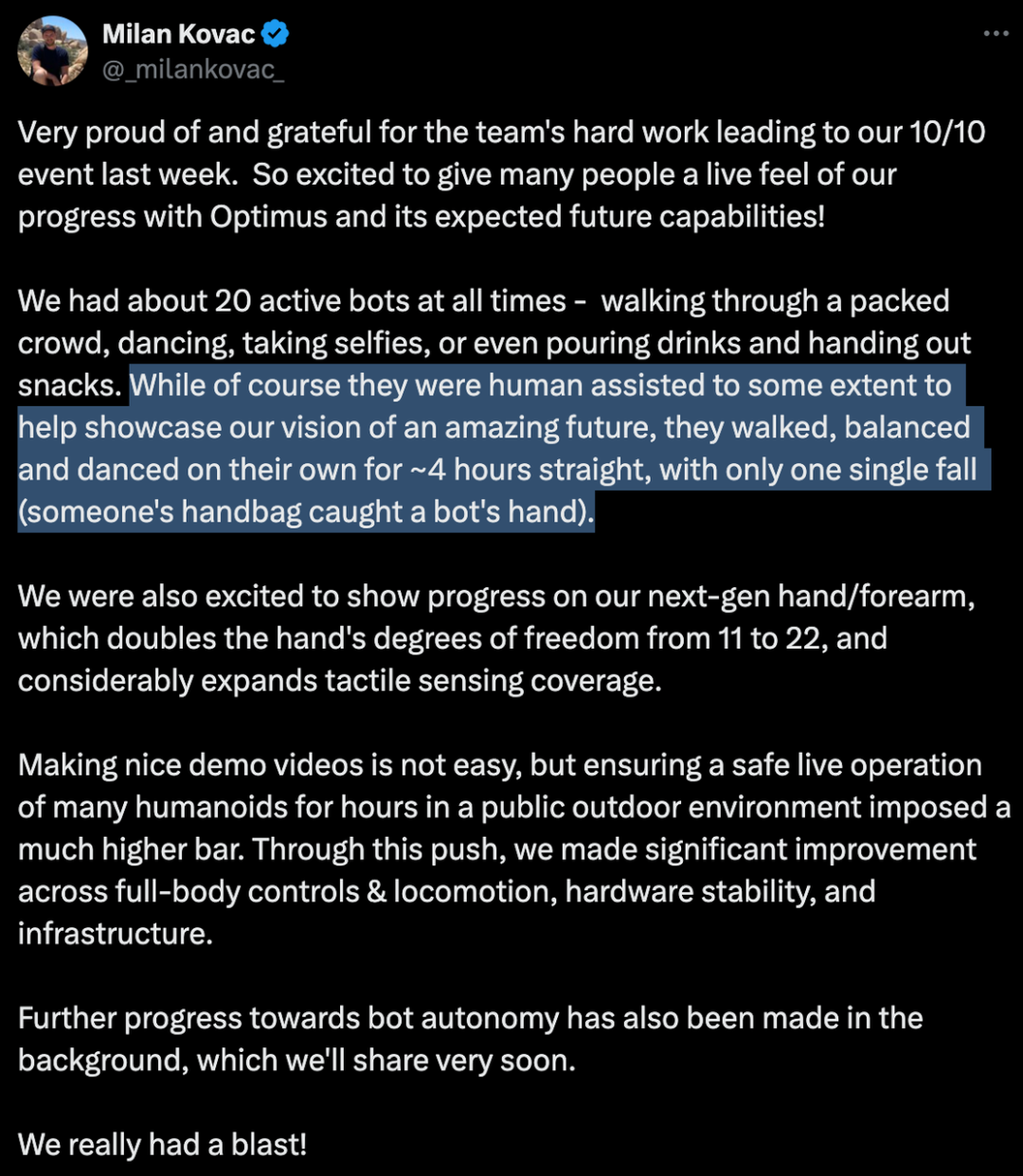
▲特斯拉机器人工程师Milan Kovac,X@Milan Kovac
总结起来看,虽然擎天柱每一次的出场,都有着遥操的成分,但它在遥操模式下的表现越来越好。
而马斯克就好像在完成一张庞大的拼图,一点一点地累积擎天柱的能力,让它从一个需要被搀扶着上台的“机器”,逐步变身为一个“有血有肉”的“类人”物种。
擎天柱研发每走到一个新的阶段,马斯克就开始启动一次“奇迹厨房”,用营销上的含糊口径,向外界秀一遍自己脑中关于擎天柱的拼图全貌。
哪怕这张拼图可能才完成百分之一。
结语
1939年,在纽约的世界博览会,西屋电气公司推出一款身高7英尺(2.1米)的机器人Elektro,它的外形酷似人类,会抽烟、会用手指数数,可以通过语音命令行走、会说700个单词。
一经出现,Elektro就成为大众心中的文化偶像,他激发了当时的人们对未来机器人的想象。
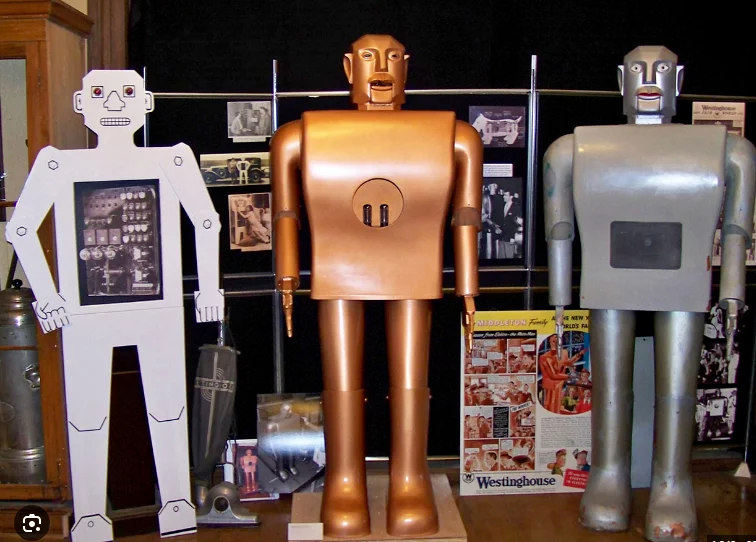
▲A Blast from the Past,图源justoborn-Elektro Robot
但实际上就像特斯拉擎天柱第一次登上发布会一样,Elektro的一切都是假的,它其实是用内置78rpm的唱片机来朗读预先录制的词汇。
但85年后的今天,Elektro展示的一切已经成为现实。越来越多企业开始联合,共同推动人形机器人的发展。
比如为了给给机器人安装大脑,波士顿动力、Figure都选择了寻找软件实力强的合作伙伴,前者找到了丰田,后者绑定了OpenAI.
与他们相比,马斯克就像一个孤胆英雄,他选择了软硬件自研的路径。
不论是哪一种方法,在探索新物种的道路上,都充满荆棘。
人类一直试图厘清自己“从哪里来”,并据此衍生出女娲造人、亚当夏娃这些神话故事。
在这些神话里,中国的女娲、欧美的耶和华神,都充当着人类“造物主”的角色。而人形机器人,则是人类自己企图成为“造物主”的具象体现。
这个物种需要和人类一样,拥有自己的思想和行动。
但现在,人们还只能在“奇迹厨房”里,等待着它们的到来。
评论