

文|有界UnKnown 钱江
编辑|山茶
11月底,黄仁勋在香港科技大学的博士学位授予仪式上,将人形机器人与汽车、无人机并肩列为未来会实现大规模量产的三种机器人。
这已经不是黄仁勋第一次在公开场合“力挺”人形机器人,在今年3月份的英伟达GTC大会上,黄仁勋曾与1X Technologies、Agility Robotics、Boston Dynamics、Figure AI、宇树等9个人形机器人同时登台,发布英伟达人形机器人通用基础模型——Project GR00T。
▲黄仁勋在GTC大会上 直播截图
在之后的多个场合里,黄仁勋都向外界传递着相同的观点:人形机器人将会成为人类生活里不可缺少的伙伴,它终将成为和汽车一样的主流产品。

在关于人形机器人未来在人类生活中重要地位的看法上,黄仁勋也与马斯克不谋而合。
马斯克也曾在2024年特斯拉股东大会上表示,未来“全世界每个人都会想要一个机器人 ”,他认为人形机器人和人类的比例,至少是2比1,甚至能到1比1,未来会有100亿甚至200亿、300亿台人形机器人。在一次采访中,黄仁勋也坦言,“100年后大街上将到处都是人形机器人”,马斯克则在X上默契地回复,“人形机器人普及程度将是汽车10倍”。

▲马斯克在X平台上与黄仁勋互动 截图
黄仁勋也几乎成为除了马斯克之外,最卖力为人形机器人站台的科技大佬。但和马斯克更侧重于造出人形机器人本体、并将其应用于特斯拉的生产和劳动力补给上不同,黄仁勋更专注于做人形机器人的技术服务商。
英伟达机器人和边缘计算副总裁Deepu Talla在东京的一次会议上直言,英伟达瞄准的是一个由“数十万”家机器人制造商组成的分散市场,而不是由少数几家主要参与者主导的集中式智能手机市场,“我们为机器人提供平台,而不是制造机器人”。
那么,英伟达究竟想要做一个什么样的机器人平台?
01 打造人形机器软件生态
2021年,波士顿动力曾发布一则Atlas的跑酷视频,在全球范围内第一次掀起了人形机器人的狂热。
在这则视频中,Atlas可以轻而易举地在各种形状和坡度的踏板之间跳跃、奔跑、上下阶梯。但很多人都不知道,在这则惊艳世界的视频背后,是Atlas十多年如一日的训练。
机器人和人一样,要学会走路也需要经过无数次的训练,通过积累足够多的数据才能实现。对于早期的人形机器人而言,积累数据没有捷径,只能通过一次又一次的跌倒来完成。
所以在Atlas早期的训练视频中,我们会看到它身边时刻都跟随着好几个工作人员,以便在它“倒下”的时候及时检查零件。
但这个过程显然太过漫长,不利于人形机器人快速发展。为了提高人形机器人的训练效率,人们在AI、大数据和云计算等前沿技术的基础上,建立了一套利用虚拟世界对人形机器人进行训练的方法。
通常来讲,人形机器人的训练,会经历一个从Real2Sim(真实到虚拟)到Sim2Real(虚拟到真实)的过程。也就是先从真实环境采集数据投入到仿真环境,让机器人在仿真环境里做充分学习和训练,再将其拉到现实世界里历练。
这个过程由于有相当一部分在虚拟环境中进行,因此不仅可以加快训练速度,还可以降低硬件损耗。
英伟达在人形机器人领域的第一个布局,就是搭建一套仿真训练设施,它具体包括人形机器人仿真训练场需要使用的虚拟场所构建、人形机器人与环境互动的仿真训练,以及人形机器人控制规划学习的仿真训练。
它们分别对应着虚拟协作和仿真平台Omniverse、用于机器人行为仿真的平台Isaac Sim、用于机器人算法训练与优化的平台Isaac Lab。
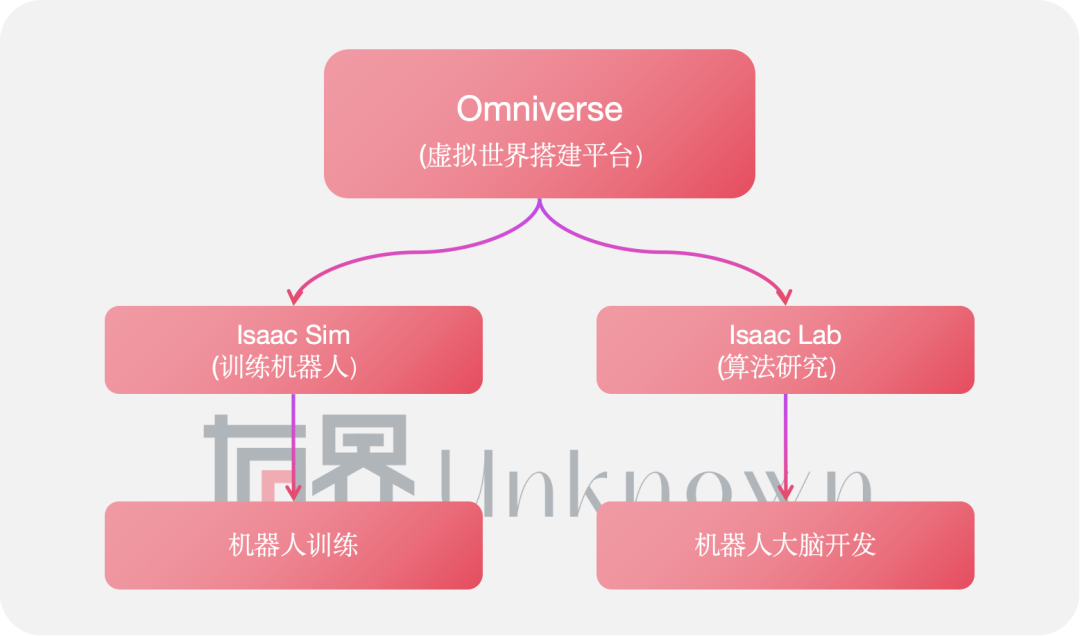
▲英伟达人形机器人软件生态,有界UnKnown制图
用一个形象的比喻,Omniverse就像一座城市,这座城市里有高楼林立的大厦、车水马龙的道路以及人类生活所需要的一切基础设施,而人形机器人就像生活在这座城市的人类一样,他们在城市之中穿梭、从事劳动活动。
Isaac Sim就像是Omniverse这座城市里的健身房一样,人形机器人需要在这个健身房不断与各类运动器材进行磨合,这就对应着人形机器人与环境交互的能力训练,它们需要了解路径规划,比如怎么样才能正确抵达所需要的运动器材面前,并且了解每一种器材的使用方法,比如看到哑铃知道是用来抓取的、看到跑步机就知道是用来跑步的。开发者使用Isaac Sim来测试机器人在不同环境中的表现,不需要实际硬件即可验证机器人的动作和决策。
Isaac Lab就像Omniverse这座城市里的图书馆一样,人形机器人需要在这座图书馆之中不断更新知识,它主要聚焦于算法开发与训练,为机器人提供决策和控制能力,允许开发者在虚拟环境中开发、测试和优化机器人控制和智能算法。
▲英伟达GTC 2024大会,Isaac Lab环境里的Digit
所以,Omniverse是一个让机器人学习如何更好适应现实世界的地方,在这样的虚拟环境中,机器人可以进行智力训练和动作训练。基于Omniverse,英伟达开发了机器人开发仿真平台和参考应用程序Isaac Sim和开源的模块化机器人学习框架Isaac Lab。
总的来说,英伟达这一套人形机器人软件生态,能够为机器人数据训练提高效率、降低成本,让机器人可以不必在复杂的硬件环境中磕磕碰碰,在进入真实环境之前,能够先在虚拟世界里“练兵”。
在今年3月份的英伟达GTC大会上登台的9家人形机器人,就是这套生态的首批“种子用户”。
在这样一套仿真机制的配合之下,英伟达发布了具身智能通用大模型——Project GR00T,与迪士尼动画《银河护卫队》中的小树人格鲁特同名,寓意着人形机器人可以如动画中的格鲁特一样拥有超凡的力量。
GROOT使得机器人能够理解和处理自然语言,并且具备多模态感知能力,即它能够通过视觉、听觉等多种感官输入来进行信息处理。
但只做软件生态,还无法满足英伟达这样一家以芯片起家的公司的野心。
02 为人形机器人造“芯”
对于英伟达来说,公司的根本一直都是硬件,是GPU。
因此在人形机器人领域,黄仁勋也同样希望能够延续英伟达在游戏、在AI、在智能汽车领域的神话,做出遥遥领先的芯片。
一个人形机器人也是由多个“芯片器官”组成的,每个芯片负责不同的任务,让机器人能够像人一样思考、感知、行动、交流和生活。人形机器人需要6-8种不同类型的芯片,包括中央控制、运动、视觉、语音、传感器和通信处理芯片,以完成全身调度、环境感知和与人类交流。

▲人形机器人所需要的芯片,有界UnKnown制图
而这些芯片中,有两类是比较关键的。一类是控制机器人运动路线的芯片,另一类是帮助机器人思考的芯片。
以特斯拉的人形机器人Optimus为例,这两块芯片分别使用的是特斯拉汽车上使用的FSD自动驾驶芯片,以及特斯拉训练自动驾驶而专门开发DOJO芯片。
在自动驾驶芯片方面,英伟达一直遥遥领先,其最新发布的DRIVE AGX Thor可提供高达2000TFLOPS的算力,是目前算力最高、效果最好的自动驾驶芯片。
而英伟达的人形机器人芯片就与Thor同出一源。
今年11月中旬,华尔街日报曾报道,英伟达计划在2025年推出面向人形机器人的专用芯片Jetson Thor,在快速增长的机器人行业中占据一席之地。
Jetson Thor具备高性能AI推理能力,支持运行如GR00T等大型多模态生成式AI模型,采用英伟达最新的Blackwell架构,并配备Transformer引擎,可以支持人形机器人在视觉、语音和触觉等多模态感知下的交互,增强其与人类的自然交流能力。这也是英伟达首次公开宣称专门为人形机器人打造的芯片平台。
Jetson是英伟达旗下专为 AI 应用设计的紧凑型计算机平台,其芯片除了机器人之外,还应用在无人机、智能家居、医疗设备和工业自动化等场景。
Jetson平台最早可以追溯到2014年,这也是英伟达在机器人领域布局的开始。
这一年,物联网、边缘计算、人工智能和机器人技术开始崭露头角,市场对与之匹配的芯片需求也在持续扩大。同时,这一年人形机器人也开始投入初期应用。软银在这一年推出Pepper,它是全球首款能够识别和回应人类情感的商用人形机器人;法国Aldebaran Robotics公司开发NAO机器人,开始投入教育领域,帮助学生学习编程、科学和数学。
也是在这一年,英伟达上线Jetson TK1芯片,它具备更强的图形处理能力和AI处理能力,采用了基于Kepler架构的GPU,并结合了ARM Cortex-A15 CPU,适用于低功耗设备。虽然它并不是直接针对人形机器人,但却为人形机器人处理复杂的视觉感知和计算提供了硬件支持。
随后,几乎每隔一两年,英伟达Jetson系列都会发布新产品,其中Jetson Xavier 和Jetson Orin相关系列对人形机器人的发展提供支持,并且它们清一色都是推理芯片。
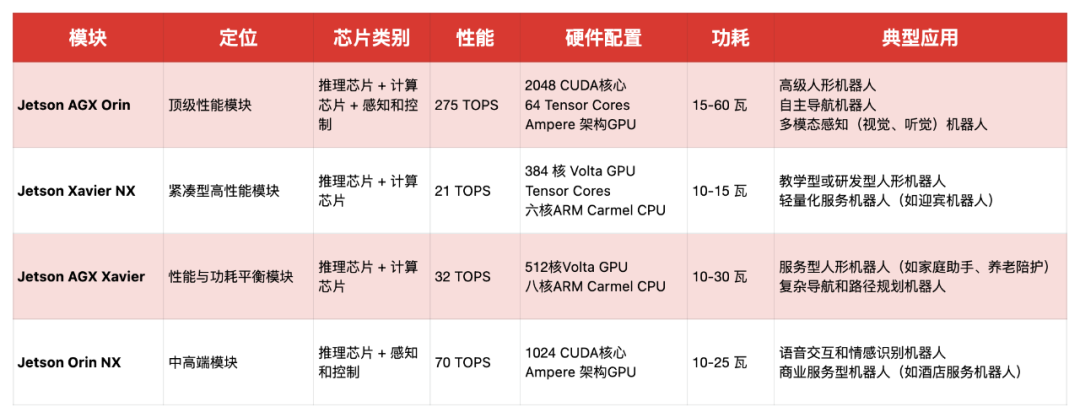
▲英伟达Jetson芯片应用介绍
虽然Jetson AGX Xavier和Jetson Orin系列适用于机器人领域,但并非专门为人形机器人而设计,它们同样适用于无人机、自动驾驶等产品。
而计划于2025年上线的Jetson Thor则是专为人形机器人打造的,根据英伟达官方表示,Jetson Thor能够执行复杂任务,并与人和机器安全、自然地交互,它采用英伟达最新的Blackwell架构,并配备Transformer引擎,可以支持人形机器人在视觉、语音和触觉等多模态感知下的交互,增强其与人类的自然交流能力。
结语
人形机器人并非黄仁勋首次做趋势性预测的领域,在黄仁勋的辉煌历史中,曾连续两次“押对宝”。
1999年,中央处理单元(CPU)仍然是计算机系统的核心,虽然图形处理的需求不断增长,但CPU主要负责所有的计算任务,包括图形渲染。当时,虽然图形显卡市场也在发展,但多数显卡只能提供基础的2D图形渲染,并且较少具备3D加速能力。
黄仁勋却在这一年推出GeForce GPU系列,发布GeForce256,成为世界上第一款GPU,也是首个支持硬件加速的实时3D图形渲染的图形处理单元。
它给游戏玩家带来了前所未有的顺畅体验,根据“英伟达中国”纪念1999年这款GPU的相关文章描述,与GeForce256结合的游戏《虚幻竞技场》是首批拥有逼真反射效果的游戏之一,在发布的第一年内,便售出了超过100万份。[1]
2006年,黄仁勋发布并行计算平台和编程模型“CUDA”,使得GPU具备处理通用计算任务的能力,CUDA的发布被夸张地形容为一场“灾难”。如果将GPU形容为一个拥有上千个工人的工厂,可以驱动工人同时处理成千上万的图形像素,那么,CUDA就像这群工厂工人的管理系统,它不仅能做图像渲染,还能做科学计算、分析大数据、训练AI模型。
这两次,黄仁勋都赢在芯片上。
那么,在人形机器人领域,除了做仿真训练平台,黄仁勋为人形机器人这个“新物种”造的“芯”,能让英伟达再次站在新的时代高点吗?
也许,不到100年,就能看到大街上到处行走的人形机器人。
评论