

科学家们从自然界丰富多彩的鱼类身上获取灵感,并将鱼类的运动机理和行为方式运用到对水下机器人运动机理和控制的研究中,仿生机器鱼由此而生。
“鱼类是最早的脊椎动物之一,经过长期的自然选择进化出非凡的水下运动能力,鱼类的运动具有高效、高机动、低噪声等特点。”4月13日,中国科学院自动化研究所(下称中科院自动化研究所)研究员、博士生导师王硕对界面新闻记者表示。
相比普通船舶最快不超过20米/秒的运动速度,剑鱼的平均速度可达28米/秒;白斑狗鱼的加速性能大大快于逐级加速的普通船舶;90%以上鰺科鱼类的推进效率,超过普通船舶40%-60%的推进效率。鱼类机动转弯的半径仅仅为体长的10%-30%,但船舶机动转弯半径则是自身体长的3-5倍。
大部分鱼类的推进方式分为身体尾鳍(body and/or caudal fin,下称BCF)推进模式和中间鳍对鳍(median and/or paired fin,下称MPF)推进模式两种。
其中,采用BCF模式游动的鱼类,主要通过身体的波动和尾鳍的摆动产生推进力,其瞬时游动的加速性能好,周期游动的巡航能力强;采用MPF模式的鱼类,主要依靠胸鳍或腹鳍的摆动产生推进力,其机动性能好。
王硕表示,对鱼类的形态、结构、功能、工作原理及控制机制等进行模仿、再造,能提高水下机器人的推进效率和速度,使水下机器人更适合在狭窄、复杂和动态的水下环境中进行监测、搜索、勘探、救援等作业。

有别于基于螺旋桨推进的水下潜器(AUV),仿生机器鱼必须模仿鱼类游动的方式,外观也更接近真实的鱼类,这也成为仿生机器鱼研究的技术难点。
早在2001年,中科院自动研究所成立了仿生机器鱼课题组,开始对仿生机器鱼进行研究。起初,课题组主要是对鱼类进行跟踪模仿,给出了仿生鱼推进的基本原理。此后,课题组发现,若想提高仿生机器鱼对环境的适应性,则需要仿生机器鱼在水中具备前后推动、上浮下潜的三维运动能力,并能保持在某一特定深度。
2004年,课题组创造性地提出了一种基于重心的仿生机器鱼俯仰姿态与深度控制方法,这种方法通过调节改变机器鱼的重心位置,实现对机器鱼俯仰姿态的调节。
经过近15年的研究,中科院自动化研究所先后完成了多关节仿生机器鱼系统、仿生机器海豚、仿生机器鰩鱼、水陆两栖机器鱼、水下作业机器人等一些列仿生机器人系统,从机构设计、控制系统等方面形成了完整的核心关键技术。
王硕表示,工业及军事等领域的需求推动了仿生机器学研究,仿生机器鱼在狭窄或危险水下环境中的监测、水下救捞、水下考古、水下设备检修等方面具有广阔的应用前景。
目前,国内外在仿生机器鱼领域的研究成果正大量涌现。北京航空航天大学曾与中国国家博物馆合作,使用自行研发的仿生机器鱼对福建郑成功战舰遗址进行水下探测,并取得了成功。

2009年,中国科学院自动化研究所开发出小型机器海豚,该机器海豚长560毫米、重约3.3kg,能成功完成列队、追逐、寻求等特殊任务;2010年,北京航空航天大学开发了一款仿牛鼻鲼的样机Robo-Ray Ⅳ。该样机长320毫米、翼展560毫米、最大游动速度约0.16米/秒。

在美国,麻省理工学院在1994年便研制了世界上第一条仿金枪机器鱼(Robotuna)。十年后,他们又研发出可弯曲的软体机器鱼,该鱼由柔软的硅橡胶为材料,这使得仿生鱼能在障碍物之间穿行而不会造成严重的损害。

此外,通过在仿生鱼尾鳍部分注入二氧化碳,替换之前以关节加马达驱动的设计,也使得机器鱼变得更有爆发力,在喷射气流的同时使能在瞬间完成100度的转向。不过由于鱼身装载气体有限,目前该机器鱼在水中的持续运动时间仅为几分钟。
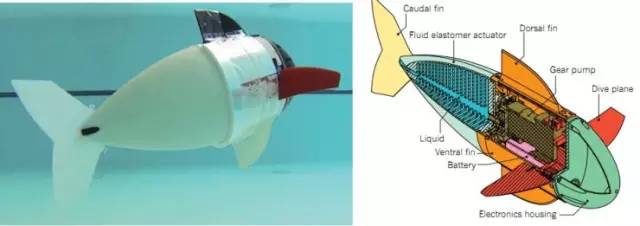
另据科学期刊《自然》(Nature)显示,在2015年5月,麻省理工还开发了一款符合真实鱼体的形态结构,能够进行快速逃避反应的仿生机器鱼。这个机器人通过流体驱动系统支持身体运动,并且具有传统机器人的所有子系统板载(电源,驱动器,处理器和控制器)。此外,该机器人还能效仿鱼类的逃避反应,实验结果显示,这条仿生机器鱼可以在160毫秒内完成逃避反应。
在英国埃塞克斯大学的水族馆里也有一条类似鲤鱼的仿生机器鱼,该机器鲤鱼能使用人工智能和内置传感器避开障碍物,模仿一个真正的鱼游泳和旋转。该机器人的电池续航时间为五小时,适用于包括海底勘探、石油管道泄漏检测、反水雷等在内的领域。
埃塞克斯大学研究人员曾表示,泰晤士河的污染状况正在不断恶化,如果不能确定河水中污染物的方位,污染物泄漏无疑将随着时间推移而变得愈发严重。投放机器鱼,不仅能确定污染物的方位,还能防止人们继续向水中排放具有潜在危险的物质。
当然,提到仿生技术,不能避开的是德国著名的气动元件和系统的制造商费斯托(Festo),该公司与著名高校、研究所和开发公司组成一个“仿生学习网络”联合体,他们以大自然中的生物为灵感,结合先进工业技术,研发了各种仿生机器人。

Aqua-ray是费斯托研发的一款由水压驱动的仿生机器鱼,其外形和动作均以魔鬼鱼为基础模型,长615毫米、翼展960毫米,最大速度达0.5米/秒。Aqua-ray的中央驱动和控制单元均采用的是费斯托气动肌腱与鳍条相互结合而成。由于Aqua-ray能被遥控操纵,而且能实现静态滑行或动态鱼鳍拍打两种运行方式,Aqua-ray在运动中的能耗相对较低。

评论